ラジコンヘリその4
今月の記事もラジコンヘリで行ってみますが、なにか?
先々月から2ヶ月がたち、腕は全然進歩していませんが機体&プロポの方はいろいろと
変わりましたので、その後の報告などかねてセッティングを一から見直してみることにします。
以前から気になっていた事の一つに、サーボの動きが個体によって違うことがあります。
どういう事かというと0ピッチの時にスワッシュの水平をとっていても、マイナスフルピッチ、
プラスフルピッチの時には水平がズレるということです。
前回はホバリングピッチ付近で水平が取れていればいいと、そこだけ水平をとって
あとは見て見ぬふり。
ま、これでもホバリングしている分には特に弊害がない(多分)のでそのまま飛ばしていましたが
なんとなく気持ち悪い。
「どうすりゃいいんだー」と、いろいろ調べていくうちに「エンドポイント」で調整するといいみたい。
早速やってみました。
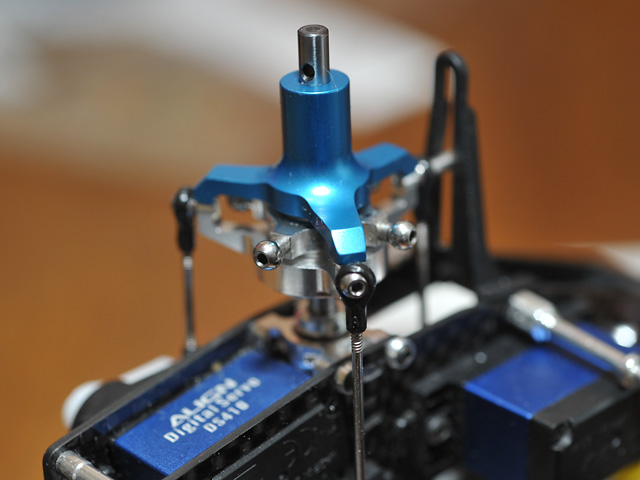
ローターヘッドを外してスティックセンターで水平のチェック。
わずかにズレています。
ほんとはリンケージで合わせた方がいいんですが、リンケージだと半回転ごとになっちゃって
微調整ができなのでサブトリムで調整。 ←ホントはめんどくさかっただけ。
次にピッチ最大と最小をエンドポイントを使って水平に合わせます。
これでスワッシュの水平は完璧(多分)。
次に気になっていたことに、今までの設定ではピッチ最大と最小が+14〜-14度くらいで
ピッチカーブの設定が最大でも80%くらいになってしまうこと。
T-Rex 250のメインローターのピッチは説明書によるとホバリングモードで-2度〜+11度。
スポーツモードや3Dモードでも-11度〜+11度。
オートローテーション用のホールド設定があればもう少し大きなピッチ設定もあるかと思いますが
このクラスの小型ヘリではオートローテーションは無理らしい。
・・・いや、やる気もありませんが。
ということは可動範囲が大きすぎるような気がする。
こんなになくてもいいべ。
サーボホーンのリンク取り付け位置を内側にずらすのもひとつの手だとは思いますが
もうちょっとスマートな方法はないの?
と、これもネットをうろうろして調べると「スワッシュAFR]という機能を使って合わせられるみたいです。
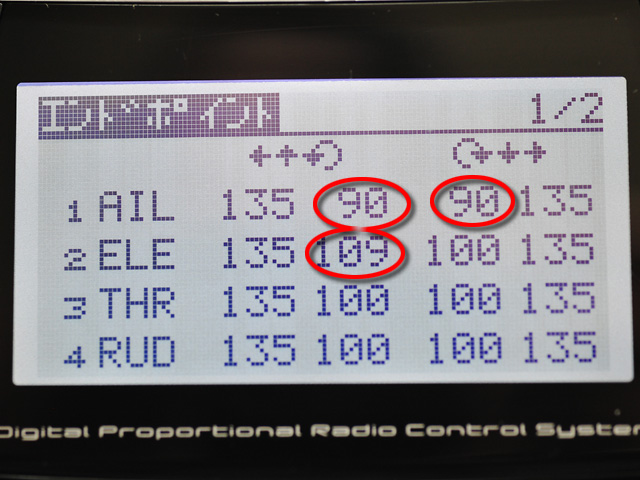
上記の理由で+11〜-11度の範囲に収まるようにAFR(Adjustable Function Rate)値を設定します。
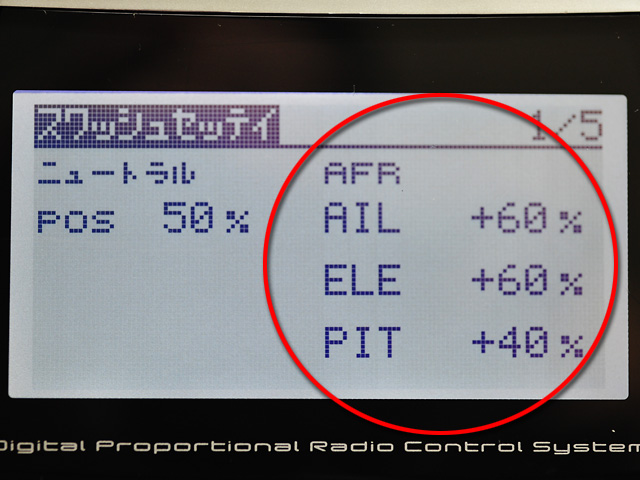
実は、当初ここの「AIL」、「ELE」、「PIT」というのはサーボのことだと思い込んでいて
すべての値を同じ数値(+40%)に設定していましたが、ちょっと違うみたい。
よくよく見てみると、これはサーボじゃなくてスティックの方なのね。わかりにくい。
エルロンとエレベータは各コンディションごとにデュアルレートで設定するらしいので
ここでは最大舵角を取れるようにするんだそうです。
スティックを一杯に切っておいて手でローターシャフトを回しながらこの数値を上げていくと
あるところで急に重くなるところがあります。
その手前が最大舵角。
でもそのままだとエルロンとエレベータを同時に操作したときに弊害がでるので
両方共一杯に切った時もチェックしておきます。
そこから少し戻した値で決定。
ホントはピッチ方向にもう少し余裕がありましたがなんとなく数値を揃えちゃいました。
意味ありませんが。
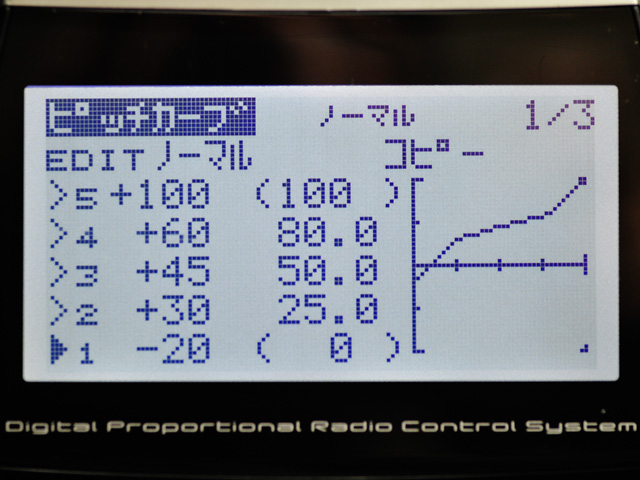
これでピッチカーブ-100〜100で-11〜+11度のピッチになりました。
あー、気持ちがイイ。
ホバリングモードのピッチカーブ。
これで飛ばしてみましたが、大した変化は無いだろうと思っていたのに、離陸時のスロットル操作が
ずいぶんとやりやすくなりました。
いや、気のせいかもしれませんが。
それから、それから、さらになんとかならないものかと思っていたことがスティックの使用幅。
え〜と、なにかと言いますとホバリングしている時にスティックって中心のほんの少しの幅しか
使わないじゃないですか。
まだまだ宙返りや360°ロールなんてしない(できない)のでそんなに舵角いらねーべ。
いつも中心のほんの数ミリに神経を集中してコントロールしているんですがモチッとなんとかならね。
と思ってまたもやネットをうろうろ。 ←マニュアル読めよ
ん〜、インターネットが無かったらとっくにめげてたかも。
と、これはデュアルレートとEXPで設定できるそうな。
えっ、常識ですか。
すみません。
ちなみに、デュアルレートというのは舵角の制限。・・・たぶん。
EXPというのは舵角0付近の舵角変異を制御してスティックに対する反応を抑制するもの。
サーボモーターの回転運動を直線運動に変えるため、動きがリニアでなくなることの補正みたいです。
今までの設定はデュアルレート100%、EXP 0%。
さっきAFRで舵角を物理的限界(?)まで設定してありますのでホバリングモードでは思い切って
60%にしてみました。
EXPはあまり上げると反応が鈍くなって嫌なので今のところ15%に落ち着いています。
で、すげー楽。
こんなんでいいのか。堕落しないか? ←もともと大した腕ないから大丈夫。
これならローターの回転もう少し上げてもいいかも。と、ろくにホバリングもできないクセに思っています。
さらにもう一個。
離陸させるとき、そのままスロットルを上げると左に流されるでしょ。 ←誰に話しかけている?
それを補正するために右にエルロンを打つんですが、そうすると機体が後ろにダーッと流れてくる。
これって仕様?
機体の後ろが重いの。
前トリムにしてみても離陸時に機体が迫ってきます。
これはどうしたものか。
・・・「スワッシュミックス」というのがあるらしいです。
いやー、至れり尽くせり。 ←モノを知らないだけ。
よくよく見てみるとエレベータを打ったときにも横に動いています。
で、こんな感じ。
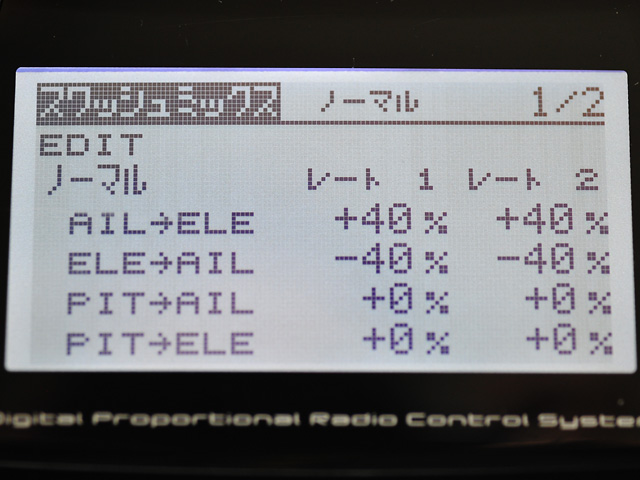
いやー、こんなに素直になるんだ。
操縦しやすいです。
以上、プロポの設定だけですごく飛ばしやすくなりました。
まさに知識は力だっ。
プロポとともに機体の方もいろいろ変わりました。
こちらはBlogの方にも時折書いていますが、まず、キャノピーをCanoModのモノに変更。
取れやすかったスキッドナットを両面テープで固定。

アンテナ処理の変更。
タイラップ処理の変更。

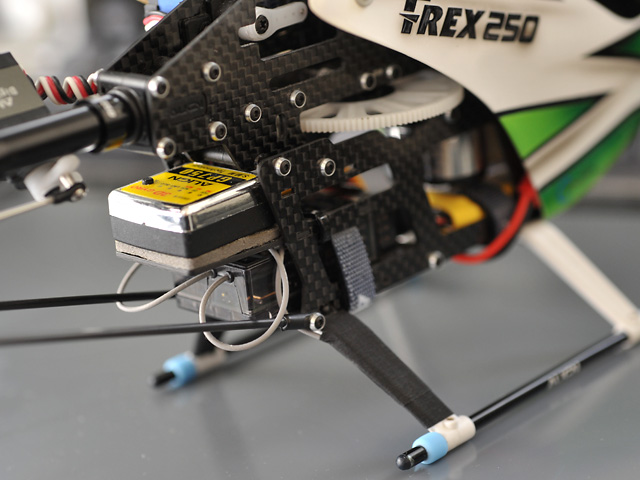
フライバーの長さを片側1.5mm延長。
などなど。
飛ばすのも好きなんですが、いじるのも好きなので墜落が少なくなってくると
いろいろ変更したくなってくるんですね。
結局お金が出ていくぅ。
追記
フライバーなんですがEXPを設定すると同じような効果があります。
っていうか、フライバーを長くするとセンター付近の舵が効かないクセに効き始めるとガバっと効くので
デュアルレートとEXPで調整した方が良いみたい。
というわけで今はフライバーの長さが標準、EXPが20%になっています。